Introduction
Swap a motor into the first circuit! Two quick tests will show how limited the existing switches are when controlling motors instead of LEDs.
Video Overview
-
-
LEDs turn on and off to make light but they do not turn on in multiple ways... and they certainly will not propel a real ROV in the water. Motors, however, CAN turn on in two directions and CAN propel an ROV in the water. Do the existing switches in the control box allow for a motor to move in both directions possible?
-
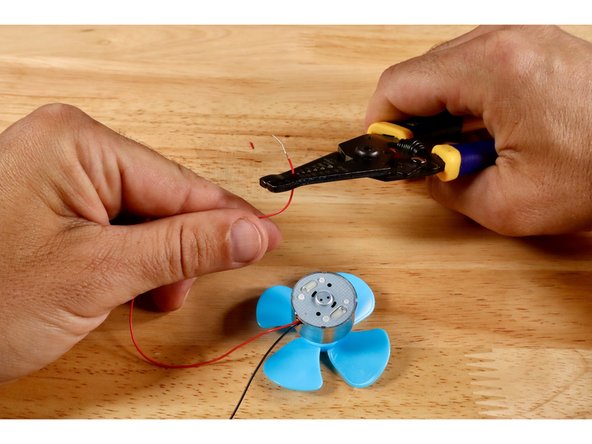
Push the blue fan onto the motor axle. Afterward, use a wire strippers to strip 1/4"-1/2" of the insulation from the ends of each motor wire.
-
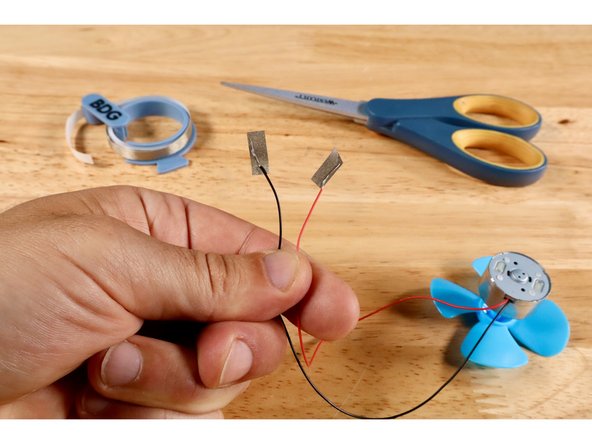
Measure, cut, peel, and stick a small 1/2" piece of Maker Tape to each of the motor wires as shown.
-
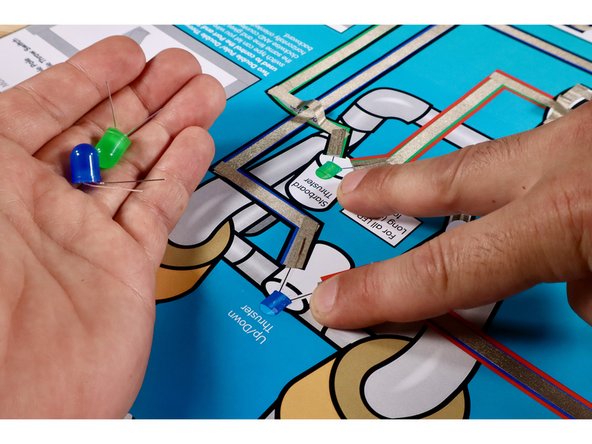
Now remove the Blue and Green LEDs from their positions on the ROV graphic of the first circuit. You will be adding the motor to each of these two vacant positions to test how the existing switches control an ACTUAL thruster.
-
-
-
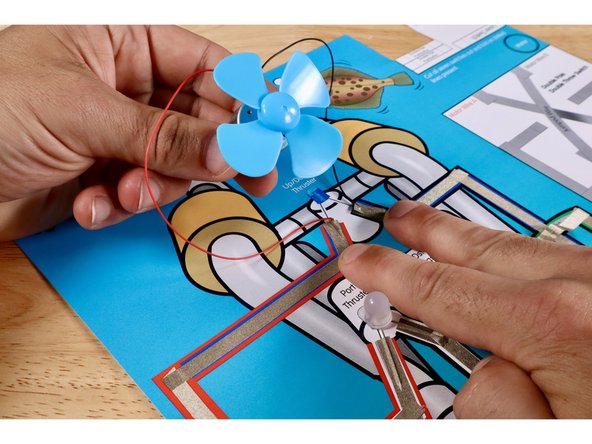
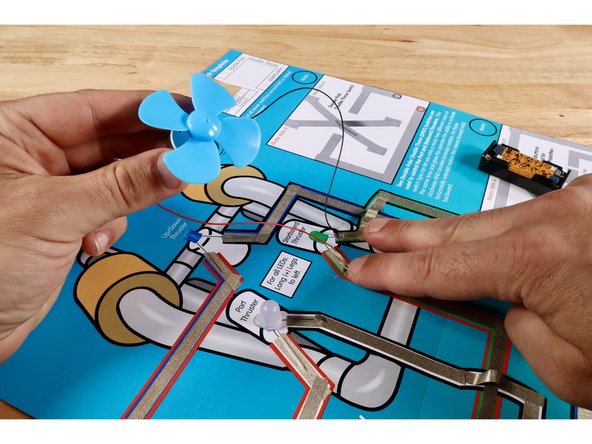
Stick the motor wires to the two Green LED/ROV Outcome path segments as shown. Now the control box lever that previously controlled the green LED will control the motor.
-
Operate the lever switch and observe what happens at the motor. Does it turn on and off? What direction(s) does the fan move?
-
-
-
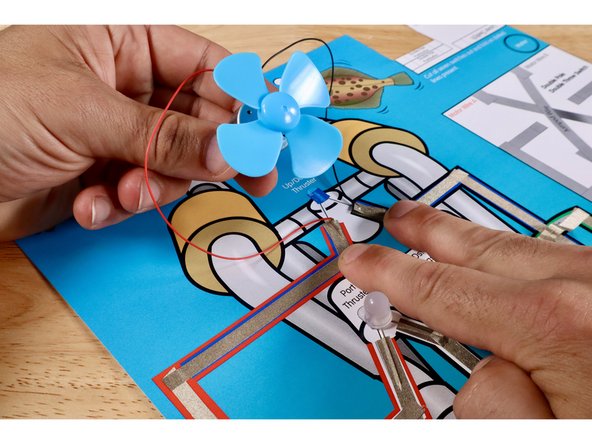
Now pull the motor wires up from their positions on the Green Path and use them to connect where shown atop the Blue LED/ROV Outcome path. If you need to cut two fresh pieces of Maker Tape, do so. The two pushbuttons that previously controlled the Blue LED will now control the motor.
-
Operate each of the two pushbuttons and observe what happens at the motor. Do the pushbuttons turn the motor on and off? What direction(s) does it spin?
-
The existing switch types in the control box are just fine for controlling LEDs because all LEDs need to do is either turn on or turn off. The same switches are not sufficient for allowing motors to operate at their full potential because they need to spin in BOTH directions. The remaining two Flat Fish projects show the improvements needed in order to control three motors on an ROV.
The existing switch types in the control box are just fine for controlling LEDs because all LEDs need to do is either turn on or turn off. The same switches are not sufficient for allowing motors to operate at their full potential because they need to spin in BOTH directions. The remaining two Flat Fish projects show the improvements needed in order to control three motors on an ROV.