Introduction
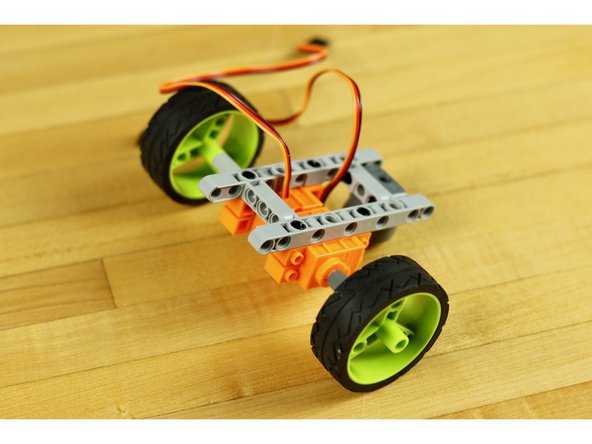
If you're building a vehicle that needs two motors to control motion and direction you can start with our simple design. This setup works well with our LEGO compatible 360 Servos and Motors, which means it works well with our Robotics Board and sensors. From this basic design you can easily expand a project by adding more LEGO Beam Frames or Technic bricks, but this is by far the most simple way of getting a basic design made up.
One useful tip, if you're going to be making an autonomous vehicle try using some LEGO tank treads. They work better on a wider variety of surfaces such as carpet. They also look much cooler. If you do go with standard wheels you'll need to use some axle connectors to connect the wheels to the axle on the servo. Adafruit has a nice LEGO axle compatible wheel that works very well with this motor.
-
-
We're building a very basic chassis using two motors and a bearing.
-
You'll probably want to use more the one LEGO frame for this project in order to give yourself more room to build upon.
-
-
-
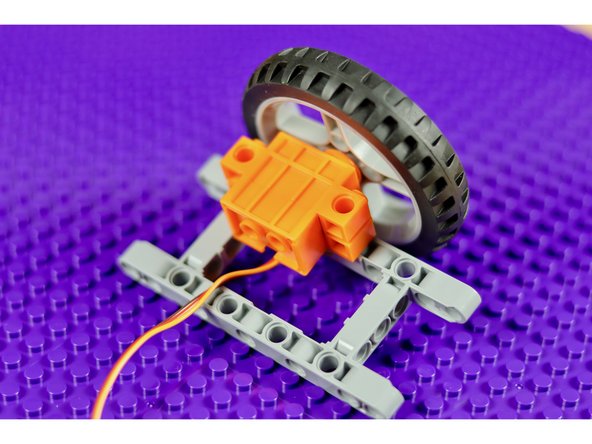
Use some pegs to attach the servo to the frame.
-
-
-
You'd be surprised how often people don't have the servos lined up properly with each other.
-
-
-
The steel ball and joint allow for a third point of contact with the ground. Use two pegs to stick this on the back of the frame.
-
-
-
If you wish to use wheels you'll need to use an axle connector and a short axle, as the axle part of the servo isn't long enough to connect to most wheels.
-
Tank treads are always the way to go if you can, but you'll need to make a larger body and you probably want to do some gear reduction to increase the power going into the system.
-
You could also use a pulley and rubber band to drive a shaft.
-
Adafruits 'black multi-hub wheel' works quite nicely with this motor, however its a really big wheel and if you want to use a bearing on the back you'll need to build downwards.
-
-
-
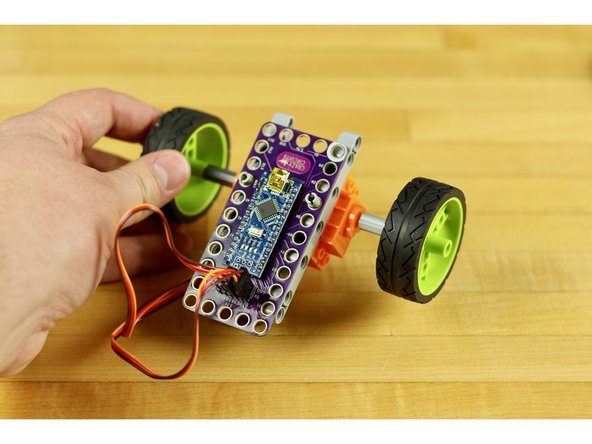
Use a couple of pegs to connect a robotics board on top, or to start building upwards to add in more components.
-