Introduction
Connect a 270˚ Servo to a Bit Board and control it with a Potentiometer and code.
We'll explore using a potentiometer (and some code) to control the movement of a servo motor.
Video Overview
Featured Document
-
-
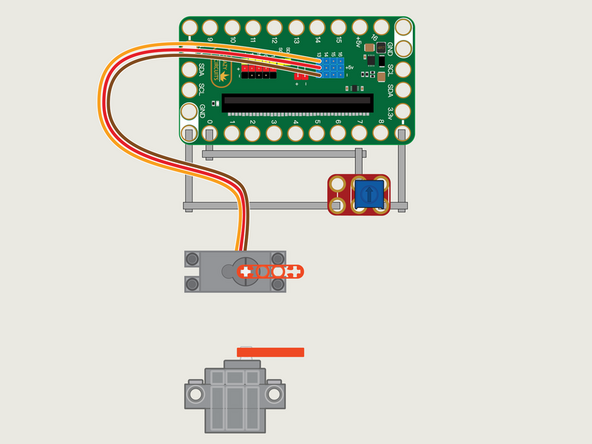
The 270 Degree Servo Motor has a 3-wire connector on the end that can plug directly into the pins on the back of the Bit Board.
-
Make sure the Orange Wire is closest to the number 13 for the Pin 13 column.
-
Then the Brown Wire should be closest to the micro:bit (in the - row) and the Red Wire will be in the middle (the +5v row).
-
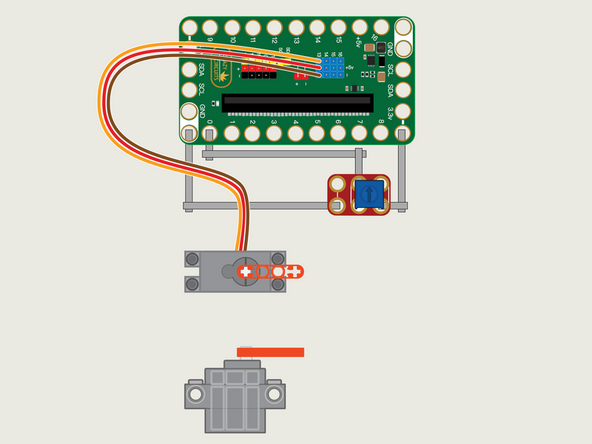
We'll need to connect one side of the Potentiometer to Ground (GND) and the other side to 3.3v
-
We will then connect the center of the Potentiometer to Pin 0. (Note that Pin 0 is an analog pin, which we'll need for the Potentiometer.)
-
The other analog pins are 1, 2, 3, 4, and 10. See this chart for a pinout diagram: https://makecode.microbit.org/device/pin...
-
You'll notice the Ground on the Bit Board is color coded White.
-
The 3.3v hole on the Bit Board is labeled and is actually two holes right next to each other on the Bit Board. (There is a small line showing the connection between them.)
-
-
-
If you've never used a micro:bit before you'll want to check out this guide: Bit Board V2 Setup and Use
-
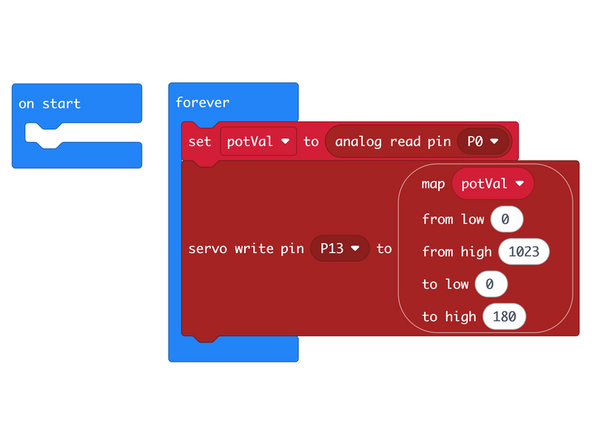
We're going to load the following code for our Servo Potentiometer Sweep program: https://makecode.microbit.org/_4rYLvxERj...
-
This one is very basic. We'll assign the input from the Potentiometer to a variable named potVal.
-
We'll then use the map function to take the value from the potentiometer (0 to 1023) and map it to the scale used to control the Servo (0 to 180).
-
That's it! This is the classic "Servo Sweep" using a Potentiometer to control the movement.
-
-
-
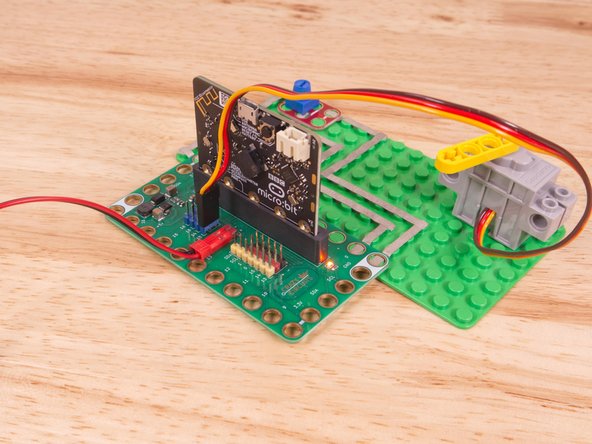
Once the code is loaded it should start running immediately,
-
You can power the micro:bit via the USB cable you used to load the code, but now that we are using servos we recommend using a battery pack plugged into the Bit Board.
-
The Blue Pins on the Bit Board provide extra power (5 volts instead of 3 volts) by boosting the voltage coming from the battery pack. This helps improve servo performance, especially with multiple servos.
-
The Servo will probably move right away, as the micro:bit will read the position of the Potentiometer and move the Servo appropriately.
-
Turn the Potentiometer and you should see the Servo move.
-
-
-
Follow along with our recorded Live Stream!
-
You can watch the full video of us walking through this project, along with explaining and exploring the code: https://youtube.com/live/7ulebPcKk2A
-

Attached Documents
