Introduction
Connect a 360˚ Servo to a Bit Board and control it with code.
We'll explore code to control the movement of a continuous rotation (360 degree) servo motor.
Video Overview
Featured Document
-
-
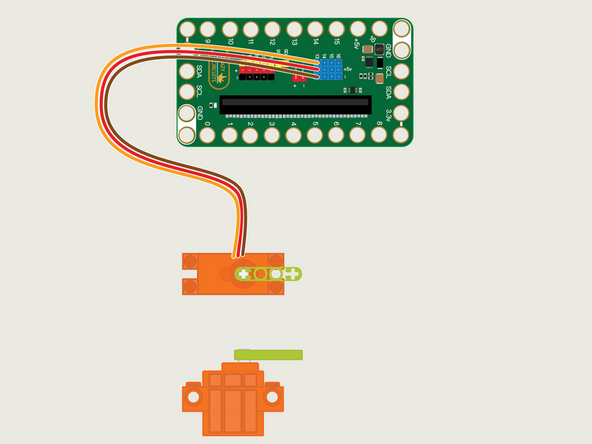
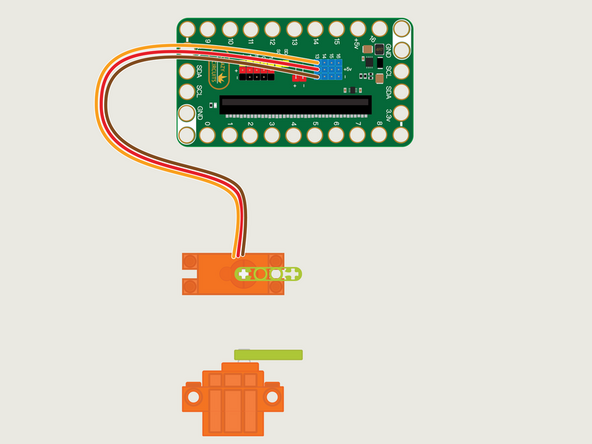
The 360 Degree Servo Motor has a 3-wire connector on the end that can plug directly into the pins on the back of the Bit Board.
-
Make sure the Orange Wire is closest to the number 13 for the Pin 13 column.
-
Then the Brown Wire should be closest to the micro:bit (in the - row) and the Red Wire will be in the middle (the +5v row).
-
A 360 Degree Servo is also called a "Continuous Rotation Servo" because it can spin around continuously without the hard stops that a 270 Degree Servo has.
-
-
-
If you've never used a micro:bit before you'll want to check out this guide: Bit Board V2 Setup and Use
-
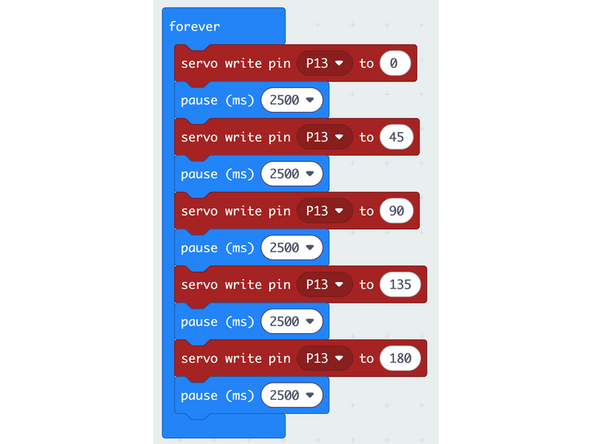
We're going to load the following code for our 360 Servo Write Turn program: https://makecode.microbit.org/_XVER5xaKf...
-
For the 270 Servo we used the servo write function. We can still use it, but it works a little different since the angles don't mean anything to a continuous rotation servo.
-
With a 270 servo this code would make the shaft move to different angles, but with a 360 servo it actually sets the speed and direction.
-
Setting the servo to anything below 90 will make it move one direction, and setting it to anything above 90 will make it move the other direction.
-
If you set the servo to 90 it will stop moving.
-
Think of 90 as stopped, and then the speed of rotation increases as you move towards either 0 or 180.
-
This is a very simple way to control a 360 Servo, but we'll explore other (better!) ways in the next guide.
-
-
-
Once the code is loaded it should start running immediately.
-
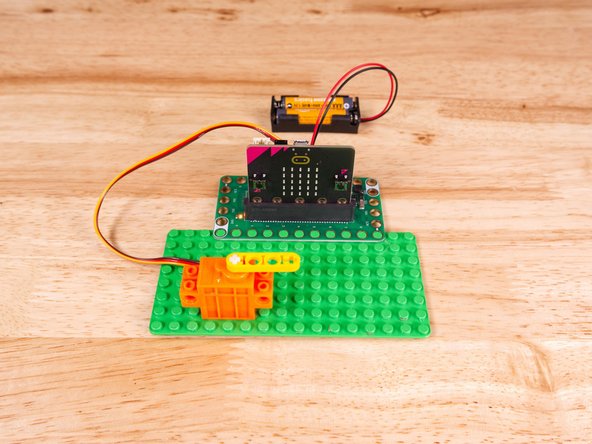
You can power the micro:bit via the USB cable you used to load the code, but now that we are using servos we recommend using a battery pack plugged into the Bit Board.
-
The Blue Pins on the Bit Board provide extra power (5 volts instead of 3 volts) by boosting the voltage coming from the battery pack. This helps improve servo performance, especially with multiple servos.
-
The Servo will spin in one direction, first at full speed, then at half speed. It will then stop, and spin in the other direction, again starting at full speed, then slowing to half speed.
-
-
-
Follow along with our recorded Live Stream!
-
You can watch the full video of us walking through this project, along with explaining and exploring the code: https://youtube.com/live/6SM5-RuBkuY
-

Attached Documents
