Introduction
Connect a 360˚ Servo to a Bit Board and control it with code.
We'll explore code to control the movement of a continuous rotation (360 degree) servo motor.
Video Overview
Featured Document
-
-
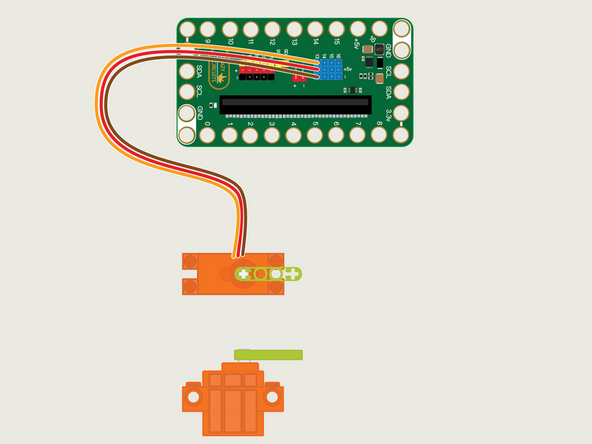
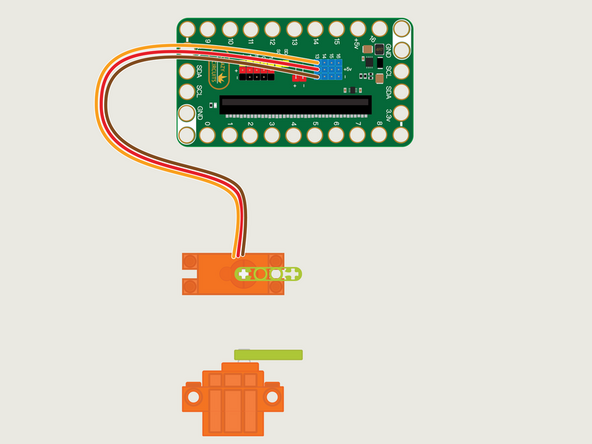
The 360 Degree Servo Motor has a 3-wire connector on the end that can plug directly into the pins on the back of the Bit Board.
-
Make sure the Orange Wire is closest to the number 13 for the Pin 13 column.
-
Then the Brown Wire should be closest to the micro:bit (in the - row) and the Red Wire will be in the middle (the +5v row).
-
A 360 Degree Servo is also called a "Continuous Rotation Servo" because it can spin around continuously without the hard stops that a 270 Degree Servo has.
-
-
-
If you've never used a micro:bit before you'll want to check out this guide: Bit Board V2 Setup and Use
-
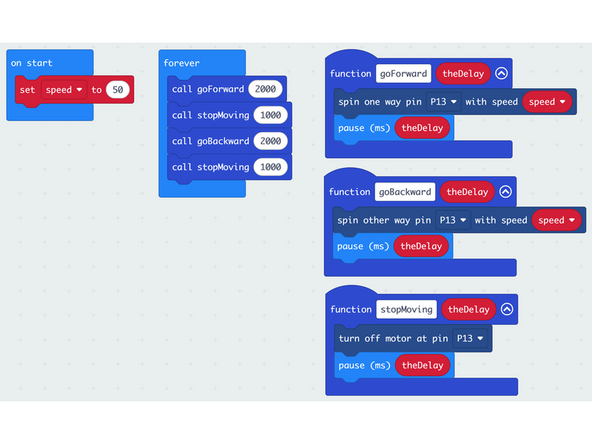
We're going to load the following code for our 360 Servo Function program: https://makecode.microbit.org/_9icMywi2F...
-
We've created three functions, goForward, goBackward, and stopMoving.
-
We're passing a parameter (theDelay) when we call the function which tells the function to run for a specified amount of time.
-
The result of using the functions is a simple and clearly labeled set of instructions in our main forever loop.
-
If this code looks familiar, it's basically what we use for our Bit Board Rover, which features two 360˚ servos used to move the Rover around.
-
-
-
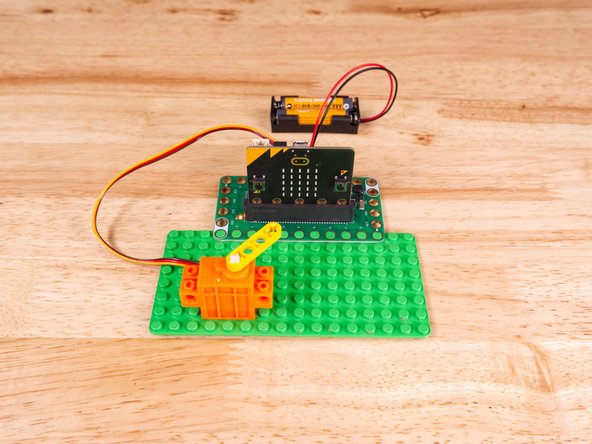
Once the code is loaded it should start running immediately.
-
You can power the micro:bit via the USB cable you used to load the code, but now that we are using servos we recommend using a battery pack plugged into the Bit Board.
-
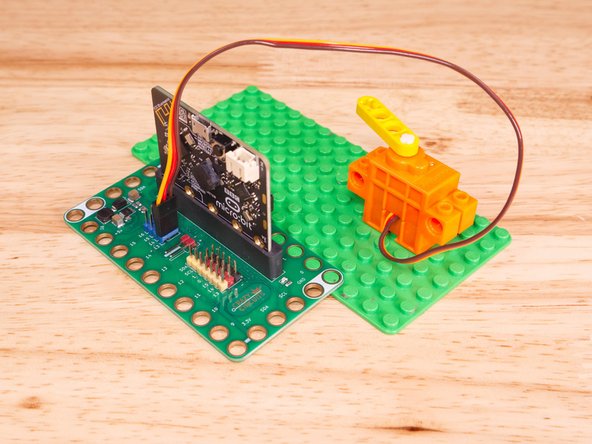
The Blue Pins on the Bit Board provide extra power (5 volts instead of 3 volts) by boosting the voltage coming from the battery pack. This helps improve servo performance, especially with multiple servos.
-
The servo will spin one direction for two seconds, then stop for one second, then spin the opposite direction for two seconds, and stop again for one second.
-
-
-
Follow along with our recorded Live Stream!
-
You can watch the full video of us walking through this project, along with explaining and exploring the code: https://youtube.com/live/6SM5-RuBkuY
-
Attached Documents
