Introduction
The Bit Board Rover can take advantage of the built-in sensors found on the micro:bit, and we can use the light sensor to "remotely control" the Rover with a flashlight.
We'll start with simple code to make the Rover roll away from you when you shine a flashlight at it, and then use more complex code to get the Rover turning as well as rolling away.
Video Overview
-
-
For this guide you'll need a completed Rover Main Body.
-
You'll also need a flashlight you can shine at the Rover to make it move.
-
A nice powerful/bright flashlight is preferable, but you can use the "flashlight" feature of a phone in a pinch. You'll just need to get closer.
-
Our Sensor Showcase covers using the sensors built in to the micro:bit. The light sensor is covered in Step 10.
-
-
-
If you've never used a micro:bit before you'll want to check out this guide: Bit Board V2 Setup and Use
-
Note: This Simple version of the code is a great starting point for this project, but the Turner version in Step 5 is more fun. This code is easier to understand and the Turner code is a bit more complex.
-
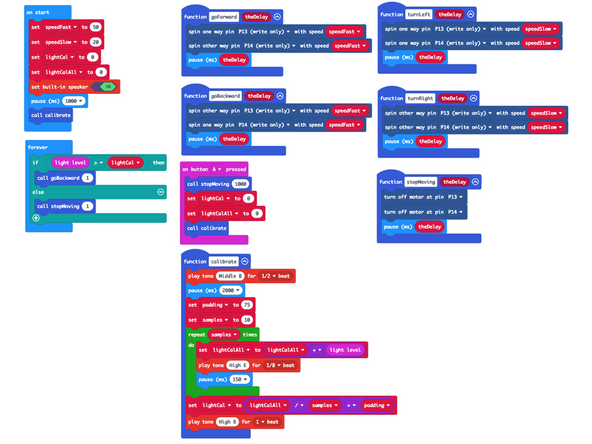
We're going to load the following code for our Rover Light Detecting Simple program: https://makecode.microbit.org/_Am6D3o5b1...
-
When you power on the Rover it will run a calibration routine to check the light levels in the room. (We'll cover the calibration in Step 3.)
-
Once the calibration is done the Rover will sit there waiting for the light levels to go above the threshold that was set in the calibration routine...
-
When you shine a flashlight on the face of the micro:bit it will detect the higher light level and the Rover will start rolling away from you!
-
-
-
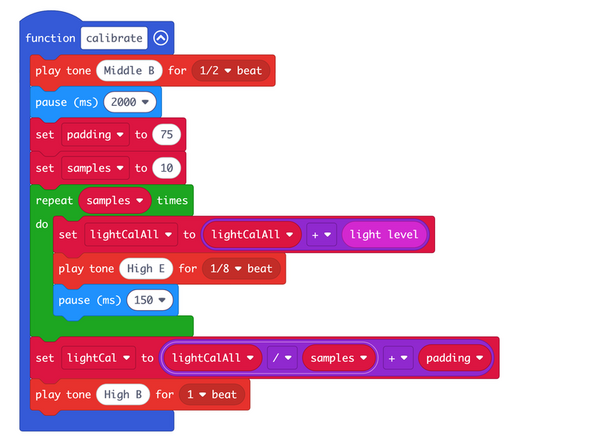
We need to calibrate the light levels in the room before the micro:bit can tell if a light is shining on it.
-
The light level can be anywhere between 0 and 255. (0 is almost no light and 255 is very bright light.)
-
Our code takes 10 readings (with a slight pause between each reading) adds them all together and the divides by the number of samples (10 in this case) to get our final value.
-
Calibration routines often use this sampling technique where a number of values are captured and then the average of them is used.
-
Once we've calculated our ambient light level we pad the number a bit to prevent false triggering. We used 75 for our pad value in this example but you can experiment with lower (or higher) values.
-
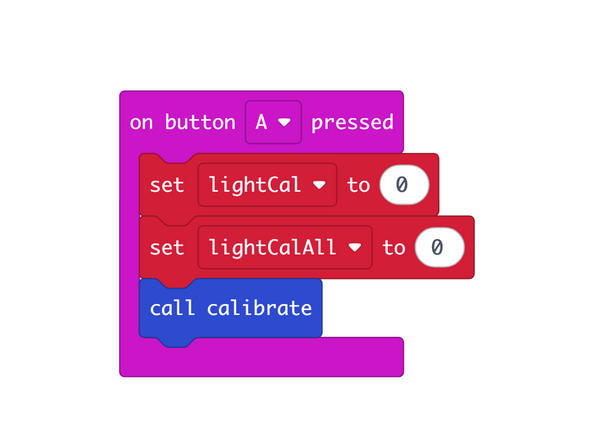
The calibration runs automatically when you power on the Rover but you can also run it by pressing the A Button on the micro:bit if you need to recalibrate.
-
-
-
Power on the Rover, wait for the calibration to complete, and then shine a flashlight at the micro:bit on the Rover.
-
The Rover should roll away from the light!
-
You can make the Rover stop by moving the flashlight away so it is not shining on the micro:bit
-
Alternately the Rover will stop rolling when it gets too far away and the light level drops due to the further distance of the flashlight.
-
-
-
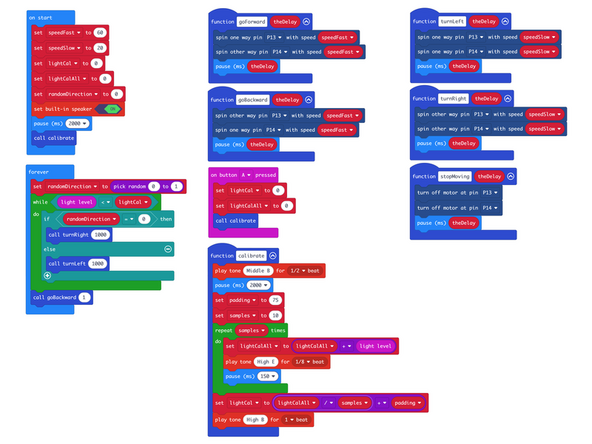
This Turner version of the code adds a few features, the most important being that the Rover will no longer sit still.
-
When the Rover does not detect the flashlight it will turn in a circle. You can wait for the Rover to turn a certain amount and then shine the flashlight on it to get it rolling again.
-
Load the following code for our Rover Light Detecting Turner program: https://makecode.microbit.org/_Dt22XJgFq...
-
The Rover may turn clockwise or anti-clockwise when not rolling. There's a function in the code to randomly choose which way to turn.
-
-
-
Power on the Rover, wait for the calibration to complete, and then shine a flashlight at the micro:bit on the Rover.
-
The Rover should start spinning around and then roll away from the light when you shine your flashlight on the micro:bit
-
When you move your flashlight away from the Rover it will stop rolling away and start to spin again.
-
-
-
The code provided (both the Simple and Turner versions) can serve as a starting point for your own ideas about how the Rover can react to light.
-
You could program a sequence of movements, or with new code even add an accessory (like the Gripper, Lifter, or Sweeper) and then try to control them with a flashlight.
-