Introduction
Who needs wheels to move around? We're going to add arms to our Rover and let it swim (or crawl) across the floor.
Parts
Video Overview
-
-
For this guide you'll need a completed Rover Main Body.
-
You'll also need some of the parts used for building the Tank and the Gripper.
-
-
-
Remove the wheels from the Rover.
-
They should pop right off!
-
You can store them with the other parts of the Rover Kit for now.
-
-
-
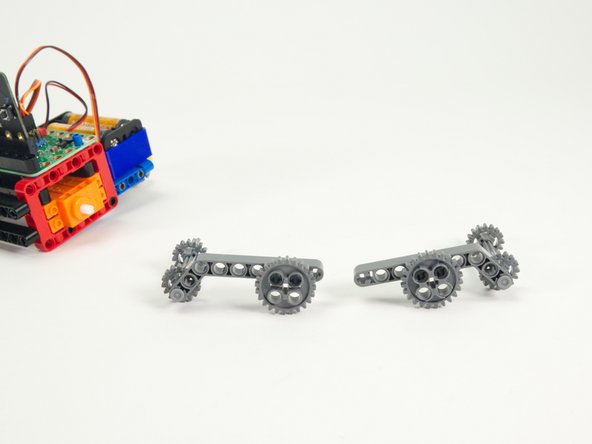
Build the arm as shown by inserting two black pins into the large gear, then attaching the angled beam.
-
-
-
Next add the axle with end stop to the end of the angled beam.
-
Finally, add the two smaller gears onto the axle.
-
The gears will help by adding some grip when moving.
-
-
-
Build the second arm as a mirrored version of the first one.
-
-
-
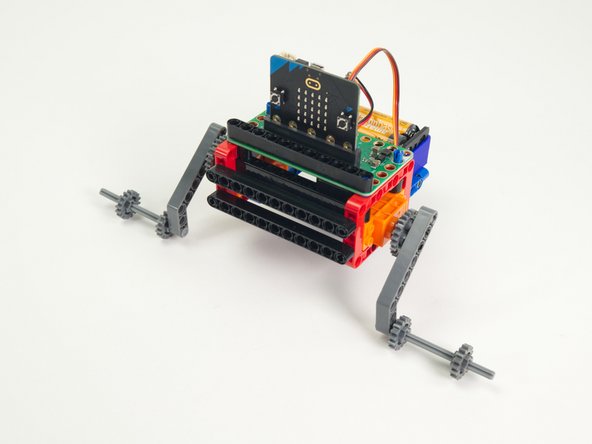
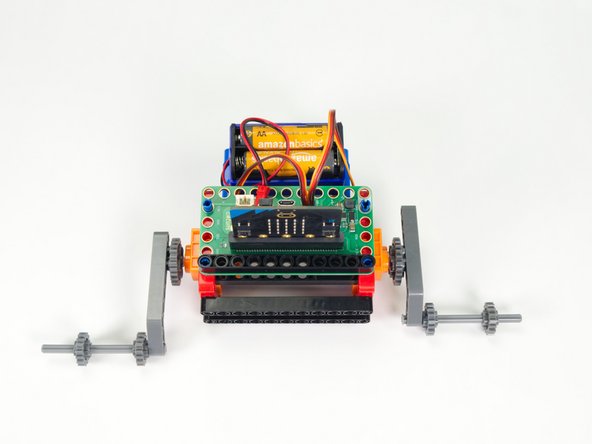
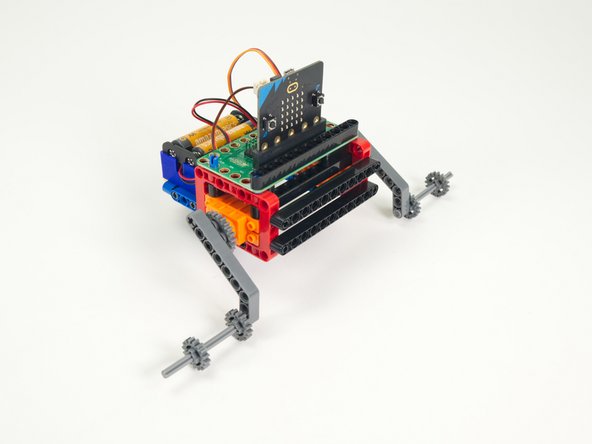
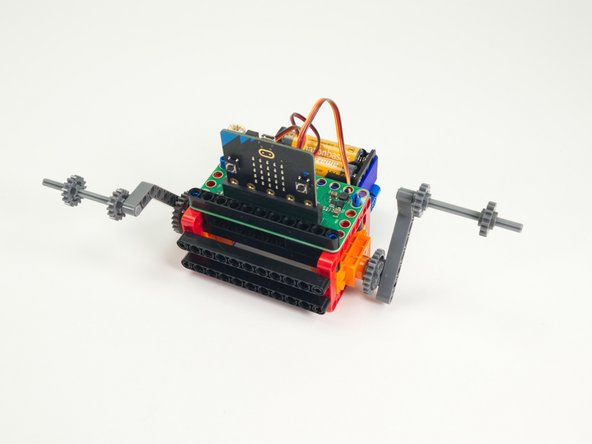
Put the arms onto the servo shafts where the wheels were.
-
Your Swimming Rover is almost ready to go. (We still need to add some code before it will move though.)
-
-
-
If you've never used a micro:bit before you'll want to check out this guide: Bit Board V2 Setup and Use
-
We're going to load the following code for our SwimBot Forward program: https://makecode.microbit.org/_48ffga9Uw...
-
This code is very simple, and just makes the Rover go forward. (For now!)
-
-
-
Power on the Rover and set it on the floor. (Carpet will work much better than a smooth floor, but it's time to experiment!)
-
The Rover should crawl (or swim) forward. Though not very gracefully!
-
-
-
Hopefully your SwimBot went mostly straight. But... can you get it to turn one direction? Let's try!
-
We can adjust things in two ways, either by adjusting the code, or by adjusting the physical build (in this case, the arms).
-
Let's look at the code first...
-
-
-
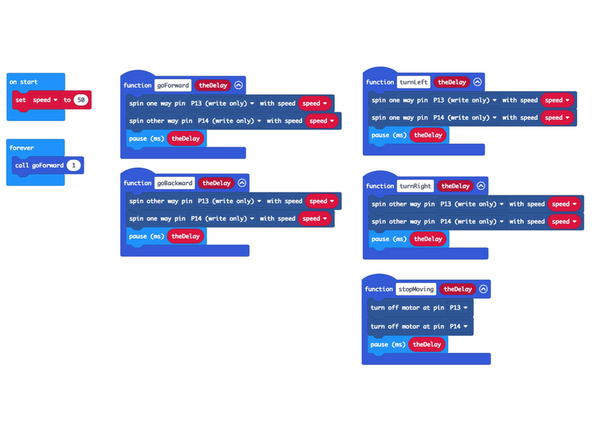
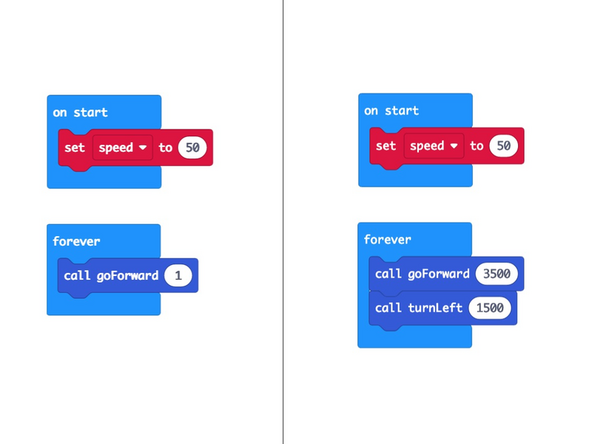
Our original code just told the Rover to go forward for one millisecond, and then that command repeated over and over.
-
Here is an example of a code change with turn left that could get your Rover moving with turns.
-
(The original code is shown on the left, new "turning" code on the right.)
-
We did not include the function to make the Rover go backwards because doing so just flips it upside down! (So that's an option if you want it.)
-
-
-
Let's reload our original code that just made the SwimBot go forward. Done? Good!
-
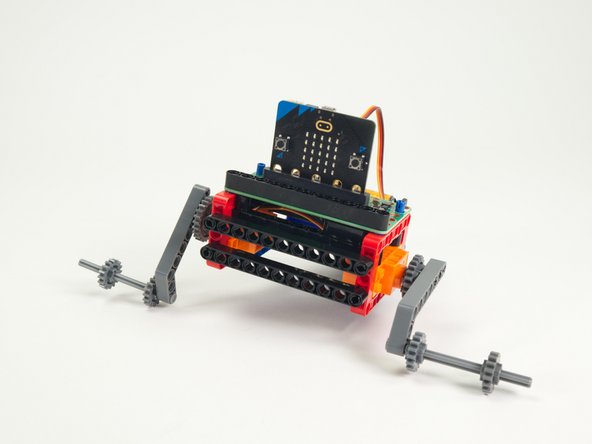
Now let's remove the arms and make some adjustments.
-
Try moving the pins from the first and second holes of the beam to the third and fourth holes.
-
Reattach the arms and give it a go! Is your SwimBot turning now?
-
-
-
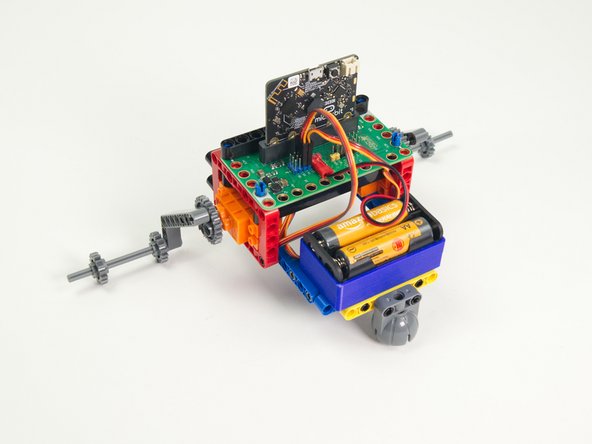
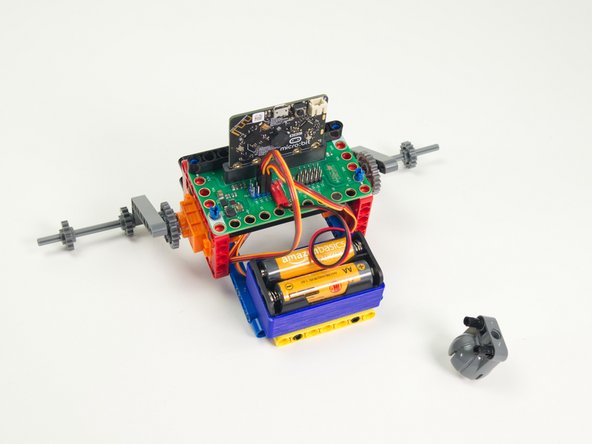
Want to take it further? One thing you can do is remove the caster wheel on the back of the Rover. See how it moves without it.
-
You can also adjust the arms, flip them around, adjust the gears... Experiment!
-
Alternately, leave your Rover as-is and make changes in the code. (Or make changes to both!)
-
You can also adjust the speed in the code. How will that change how the Rover moves?
-
You might even try remotely controlling this Swimming/Crawling. bot!
-
See if you can find other ways to make a SwimBot (or CrawlBot) with the parts in your Rover Kit.
-