
Introduction
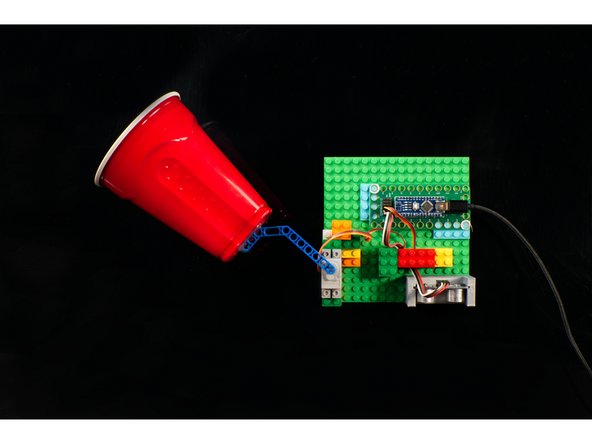
Use a Robotics Board with a servo and a distance sensor to drop confetti on someone when they walk through a doorway!
Video Overview
Featured Document
-
-
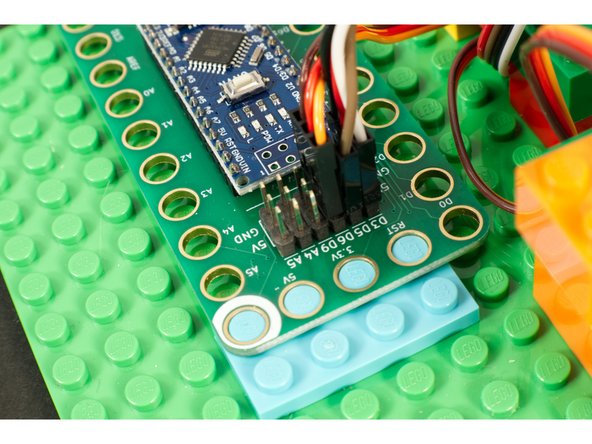
Connect the 270 Degree LEGO Compatible Servo to Pin Row 6.
-
On the servo connector the orange wire goes next to the D6 label, the red wire goes into the 5V column and the brown wire goes into the GND column.
-
Connect the Ultrasonic Distance Sensor. The Echo Pin connects to D3, the Trig Pin connect to D5, the Vcc Pin goes to 5V and Gnd goes to GND.
-
Hey! We've also got a version of this project that uses our a micro:bit and our Bit Board, in case you prefer that. See: Confetti Drop (micro:bit)
-
-
-
You may have noticed a fancy 3D printed mount holding our Distance Sensor... Check out all of our files here: 3D Printed Parts
-
You can easily attach the Distance Sensor to some LEGO bricks with a rubber band. It's our quick & easy method, and most people tend to have a few rubber bands lying around.
-
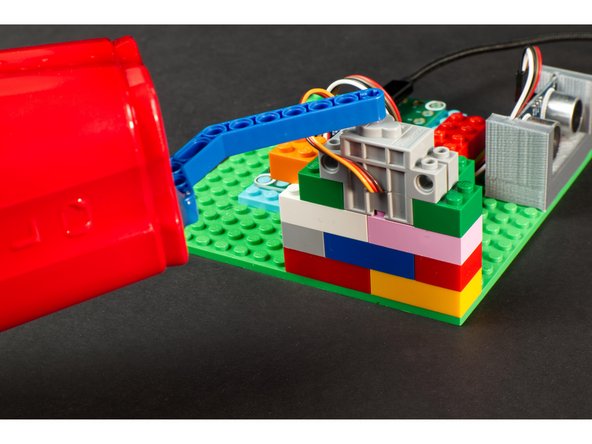
The important part of mounting the sensor is making sure it's pointed in the right direction so your victim will properly trigger it.
-
-
-
Since our LEGO Compatible Servo can attach directly to LEGO bricks it was easy to mount it.
-
You'll want to add enough LEGO pieces so it is secured in place.
-
You should also make sure there is enough clearance for the cup to move freely. Add more bricks if you need to raise the height of the servo.
-
-
-
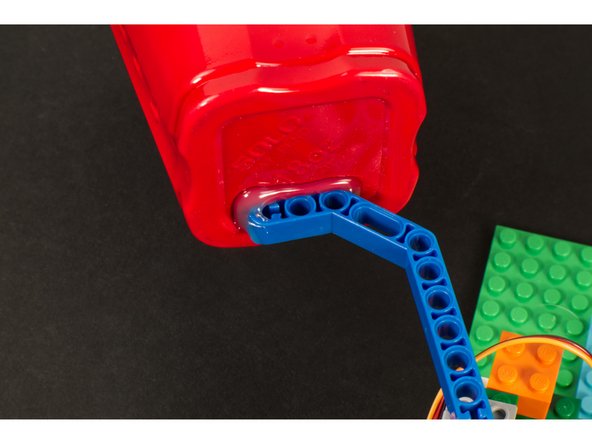
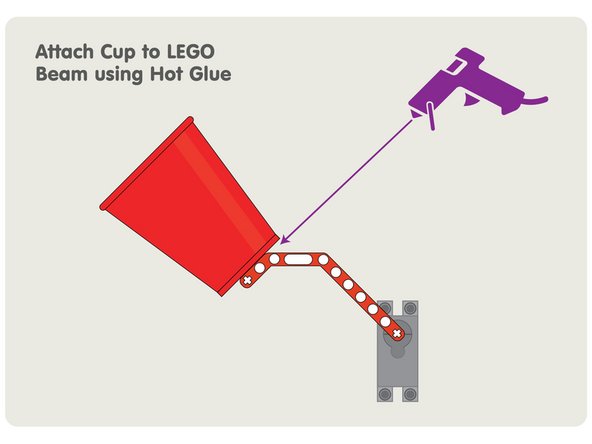
We hot glued a plastic drinking cup to a LEGO Technic Beam.
-
It's lightweight enough that even when filled with confetti it's still very little weight and the servo can easily handle it.
-
You may want to test the circuit before you attach the cup to the beam, just to make sure you know which orientation you need to place the beam on the servo, and how you want the cup glued in place.
-
If you fill the cup before you power on your circuit the servo will not be powered and may not hold in place as it does when "engaged" when power is applied.
-
Make sure your cup has enough clearance to move around. Adjust spacing of things if needed.
-
-
-
If you haven't previously programmed the Robotics Board check out this guide: Robotics Board Setup and Use
-
The code can be found at our GitHub repo here: https://github.com/BrownDogGadgets/Crazy...
-
The code is simple, and has been commented to help explain what everything does.
-
You will also need the NewPing library, which can be found here: https://bitbucket.org/teckel12/arduino-n...
-
-
-
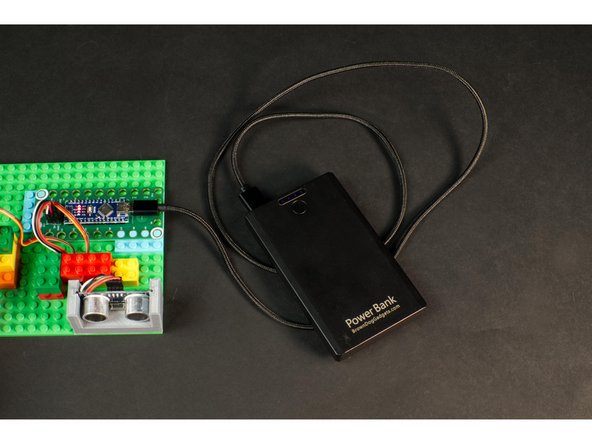
We used a USB Battery Pack to power our circuit. This made it easy to put the Confetti Drop in place without having to run a USB cable to a power outlet or computer.
-
-
-
Once you've got the code loaded we can test it out!
-
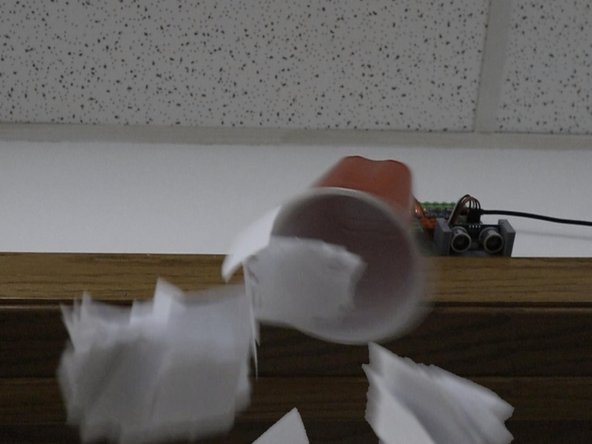
Place the circuit above a doorway, hidden on the side where a person won't see it when walking into the room.
-
Power the circuit on, fill the cup, and then get out of the way. You've got 10 seconds from the time you turn it on until it's ready to check for a person!
-
When someone walks under the sensor the servo will swing the cup down and drop confetti on them.
-
Laugh hysterically.
-
Clean up confetti and do it again.
-
-
-
Now that your Confetti Drop machine works, what else can you do with it?
-
You could add a Jumbo LED to make it easier to see when the system is "armed" and ready.
-
You could add a Slide Switch to "arm" the device instead of using the power supply.
-
Maybe you could fill the cup with dog treats and train your dog to go to a specific spot to get a treat!
-
Or maybe you could fill the cup with googly eyes or ping pong balls... or both! Either way, hilarity will ensue. Guaranteed!
-









Cancel: I did not complete this guide.
One other person completed this guide.
Attached Documents
